ROS - Introduction
Introduction presentation for the Robot Operating System (ROS).
Newcastle Racing AI (NRAI) team
What is ROS
ROS is a set of software libraries and tools for building robot applications.
It spans from drivers to state-of-the-art algorithms, to powerful developer tools, which include streamlined build systems and package managers.
Who is ROS
ROS started as a personal project of Keenan Wyrobek and Eric Berger while at Stanford.
When is ROS
ROS development began in 2007, with an exponential growth in the following years.
Loading diagram...
Where is ROS
In the ❤️ of the many developers that made it possible.
It's open source, you can find the code on Github.
Why is ROS
No time to reinvent the wheel!
Loading diagram...
Loading diagram...
Confusing versioning
ROS1 is the original version, now deprecated.
A lot of changes between ROS1 and ROS2; they are not compatible.
| ROS1 | ROS2 |
|---|---|
| C++03 | C++11/14 |
| Python2 | Python3.5+ |
| XML launch | Python launch |
| Master node | Distributed |
| catkin | colcon |
Confusing distributions
| Distro | Release | EOL | Ubuntu |
|---|---|---|---|
| Kilted Kaiju | 2025 | 2026 | 24.04 |
| Jazzy Jalisco | 2024 | 2029 | 24.04 |
| Iron Irwini | 2023 | 2024 | 22.04 |
| Humble Hawksbill | 2022 | 2027 | 22.04 |
| Galactic Geochelone | 2021 | 2022 | 20.04 |
| Foxy Fitzroy | 2020 | 2023 | 20.04 |
ROS basics
We will follow the official Humble tutorial, focusing only on the most relevant parts.
Nodes

Topics

Services

Actions

Getting your hands dirty
We have prepared a Virtual Machine (VM) with ROS Humble installed for you to get started.
Downloading the VM
Download the VM from here.
The password is nrai-ctf.
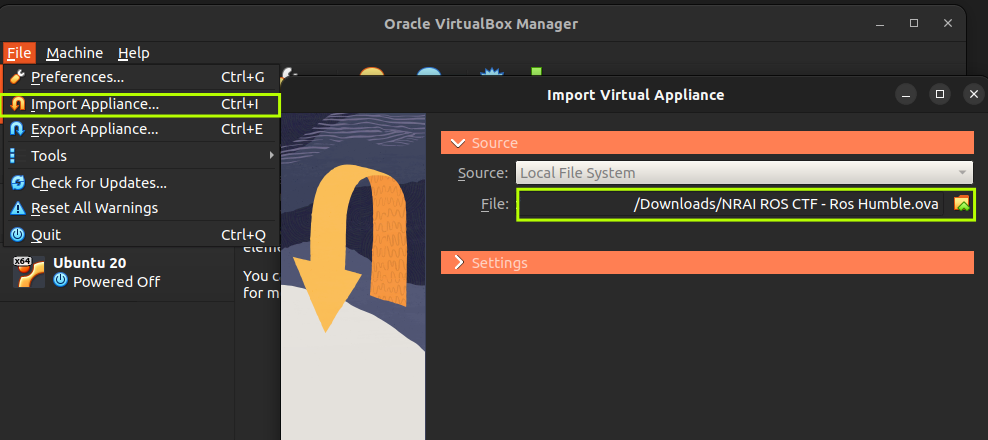
Importing the VM
Import the VM in VirtualBox. Without changing any settings, start the VM.
Logging in
Login with the following credentials:
- Username:
user - Password:
password
Sourcing
ROS uses a set of utilities that may differ from the ones installed on your machine or the ones used by other ROS distro. To avoid conflicts, you need to source the version of ROS you want to use.
# Every time you open the terminal
source /opt/ros/humble/setup.bashAlternatively, put the same comment in the ~/.bashrc file
# One time
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrcRunning nodes
To make sure everything is set up properly, run the turtle_sim node
ros2 run turtlesim turtlesim_nodeOpening another terminal, run the controller node
ros2 run turtlesim turtle_teleop_keyPlay around with the turtle and try to draw a rectangle.
ROS command line
Leaving the nodes running, open another terminal to gather some information.
ros2 node list
ros2 topic list
ros2 service list
ros2 action listIf a GUI is available, a complete overview can be achieved with
# ROS network
rqt_graph
# Log messages
ros2 run rqt_console rqt_consoleTopic commands
# List topics
ros2 topic list
# Echo topic messages
ros2 topic echo /topic_name
# Get topic info
ros2 topic info /topic_name
# Publish to a topic
ros2 topic pub /topic_name -1 msg_type 'data: your_value'Service commands
# List services
ros2 service list
# Call a service
ros2 service call /service_name srv_typeCreating a Package
What makes ROS extensible is the ability to create packages.
Packages can then be shared between other users, avoiding the need to reinvent the wheel every time.
Package structure
workspace_folder/
└── src/
├── cpp_package_1/
│ ├── CMakeLists.txt
│ ├── include/cpp_package_1/
│ ├── package.xml
│ └── src/
├── py_package_1/
│ ├── package.xml
│ ├── resource/py_package_1
│ ├── setup.cfg
│ ├── setup.py
│ └── py_package_1/
├── ...
└── cpp_package_n/
├── CMakeLists.txt
├── include/cpp_package_n/
├── package.xml
└── src/Challenges
This is a Capture the Flag (CTF) challenge, borrowed from cybersecurity competitions.
Each challenge hides a flag somewhere. Complete the challenge and claim the flag for your team.
The first team to submit the most flags wins the challenge.
The first challenges are the simplest. Use this information to your advantage.
Challenge 1: echo
The challenge 1 node keeps spamming its topic with the flag you are looking for.
Find the right topic and read the flag.
ros2 run nrai-ctf challenge1Challenge 2: mental math
The challenge 2 node has some math questions for you.
Answer correctly to all of them and it might give you the flag.
ros2 run nrai-ctf challenge2Challenge 3: ping pong
The challenge 3 node just wants to play table tennis.
Reply to its services correctly 10 times in a row to obtain the flag.
The node will wait for your PONG on the /challenge_3_pong topic to start sending messages.
| Server | Correct reply |
|---|---|
| PING | PONG |
| PONG | PING |
ros2 run nrai-ctf challenge3Challenge 4: service
The challenge 4 node is very polite.
Ask for the flag with a service and you will get it.
ros2 run nrai-ctf challenge4Challenge 5: fast mental math
There is no time to waste!
The challenge 5 node will wait for a Int32 message on /challenge_5_answer.
After that, it will start sending Vector3 messages on /challenge_5_question.
# Vector3 message on the `/challenge_5_question` topic
x: 4.0 # Counter of the current question
y: 10.0 # First addend
z: 29.0 # Second addend
# Expected result: 39Sum the two addends and return the result back on /challenge_5_answer.
After 100 correct and fast answers, you will get your flag on /challenge_5_topic.
ros2 run nrai-ctf challenge5